Smartcrane
Smartcrane
2017-2020
 Industria 5.0
Industria 5.0
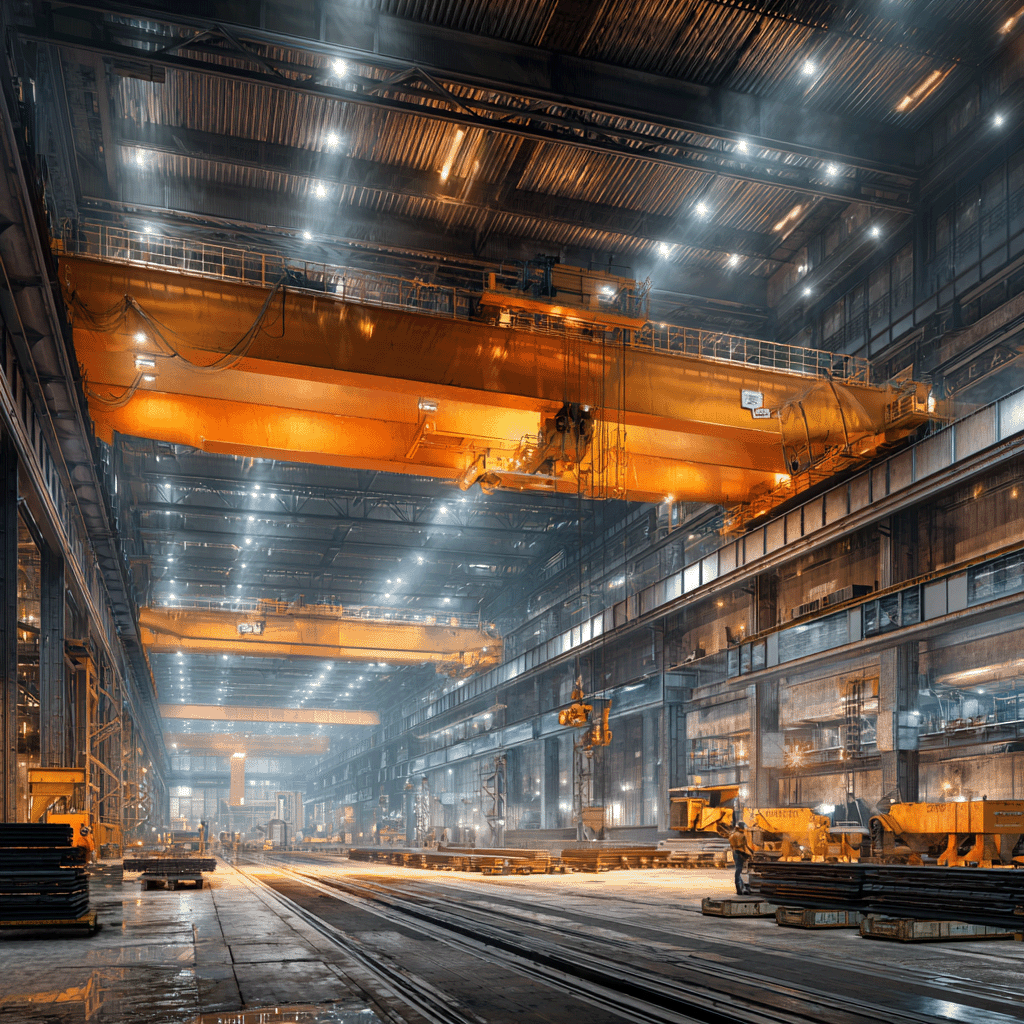
Solución autónoma inteligente para puente grúa
SMARTCRANE se centró en el desarrollo y validación de un puente grúa autónomo e inteligente para la planta siderúrgica de CELSA, capaz de recoger, transportar y descargar productos intermedios de acero de forma automática mediante la combinación de control por PLC, sensores, cámaras, accionamientos y algoritmos de navegación. El proyecto buscaba sustituir una operación manual guiada visualmente por un proceso más seguro, eficiente y trazable, alcanzando un prototipo validado en entorno real a nivel TRL 7 y orientado a reducir los costes logísticos, acelerar las operaciones de carga y mejorar la eficiencia de los movimientos de la grúa.

CELSA Barcelona

Socios principales


![]()
