AGV
AGV
2022 - 2023
 Industria 5.0
Industria 5.0
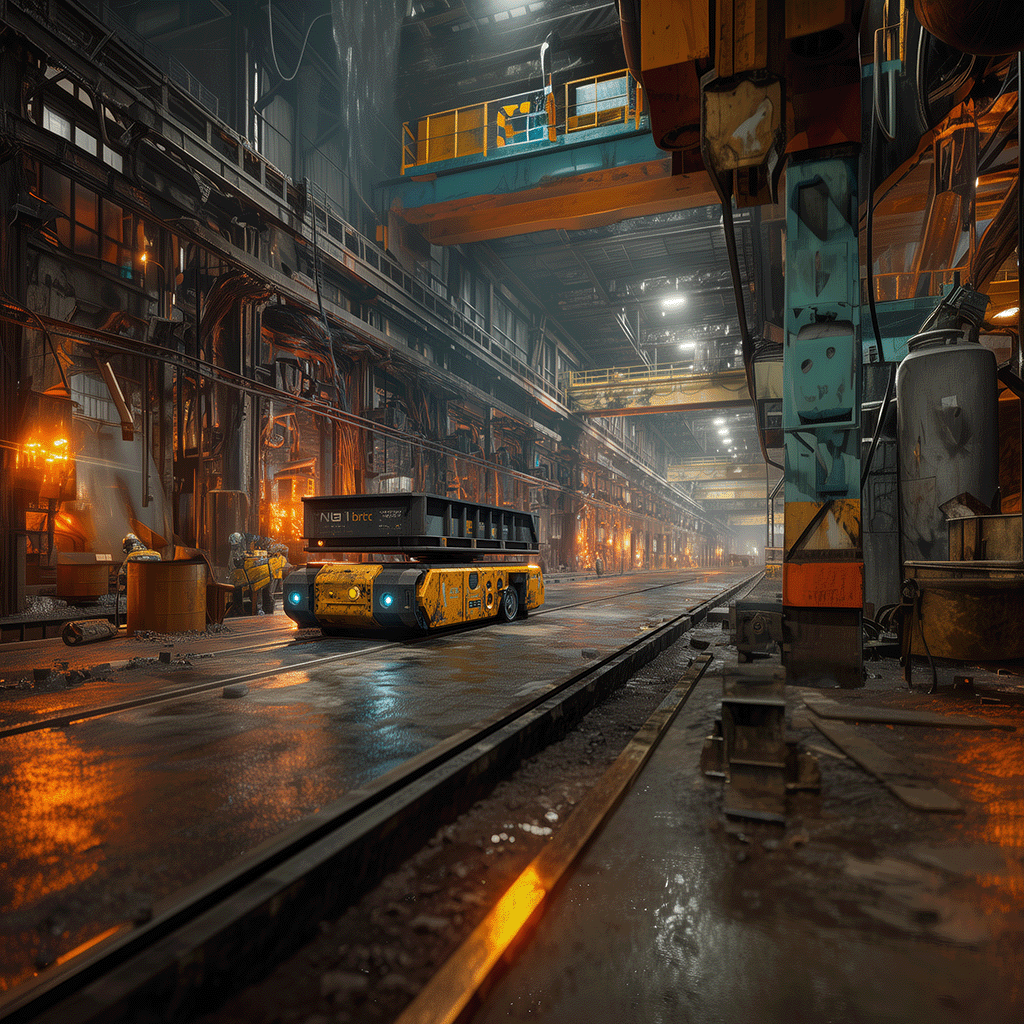
Desarrollo para una solución para el transporte autónomo de descarga de balanzas.
IC4-070050-2021-3
El proceso de evacuación de la cascarilla generada en los hornos de precalentamiento hacia la volteadora se realiza mediante un proceso manual. La cascarilla cae desde el horno a unas tolvas con compuertas de apertura manual. El operario coloca una carretilla debajo de la tolva, abre la compuerta y recoge la cascarilla. El operario empuja la carretilla hasta colocarla debajo de cada una de las 9 tolvas que componen el horno Una vez se obtiene un volumen de cascarilla significativo, la carretilla es trasladada a una barca donde debe levantarse para que caiga toda la cascarilla dentro de la barca. Esta barca, sube a cota 0 con ayuda de un polipasto y finalmente con otra carretilla es llevada a un foso de cascarilla. En este contexto, se plantea el presente proyecto para la transformación digital de los procesos clave de la laminación, mediante la automatización del proceso de evacuación de la cascarilla de óxido de hierro del horno de recalentamiento del tren de laminación de pletinas a través de un vehículo de guiado automático (AGV)(, lo que a su vez contribuirá a mejorar significativamente el proceso de valorización y recuperación de los óxidos de hierro presentes en la cascarilla, mediante una recogida del residuo de forma más eficaz y precisa.

CELSA Barcelona

Socios principales


![]()